Serie adattiva dotata di mano robotica e unità di bloccaggio Serie TNH
Con la mano robotica adattiva serie TNH, THK definisce i nuovi standard nell’automazione. Grazie alla propria capacità di presa precisa dei pezzi da lavorare, di varie forme e dimensioni, queste mani di presa innovative permettono un sostanziale aumento della produttività quando usate sui robot e sistemi di manipolazione.
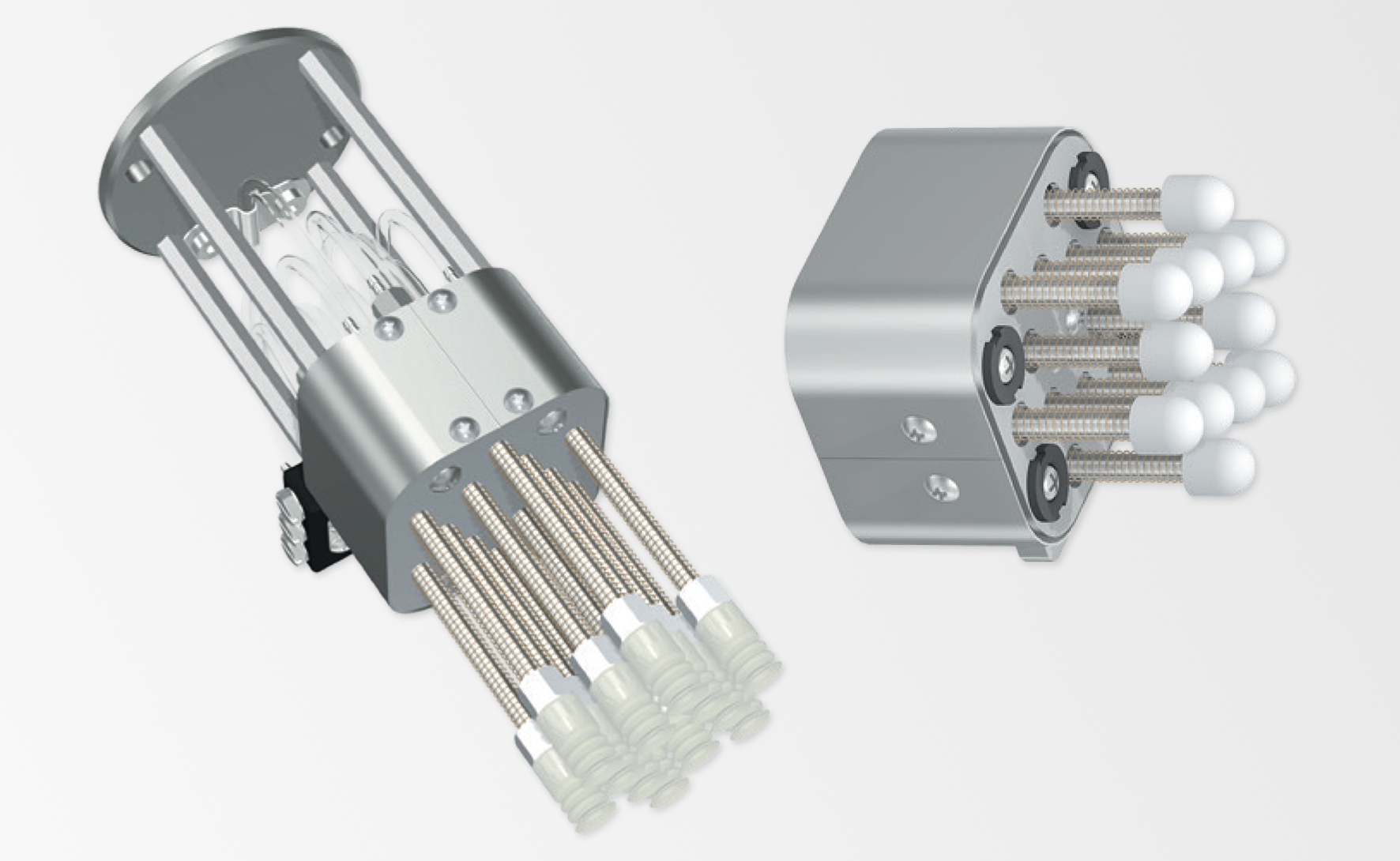
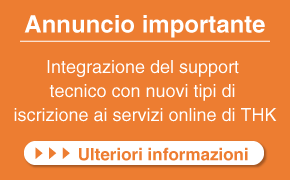
Immagine 1 Mano robotica adattiva serie TNH
TNH viene prodotta in due modelli:
- •Con ventose a soffietto: fornita di 12 alberi con ventose a soffietto, ed una valvola a farfalle incorporata. Questa mano di presa è ideale per prelevare i pezzi da lavorare di varie forme e superfici.
- •Mano di presa adattiva in disposizione accoppiata: utile per una presa dei pezzi di forme variabili, in modo stabile e con la massima flessibilità.
Un vantaggio chiave di TNH è la sua versatilità: non occorre cambiare la mano di presa per ogni pezzo da lavorare. Anche i pezzi con forme complesse possono essere prelevati, trasportati e depositati con una singola mano di presa e in sicurezza.
Le mani di presa compatte e leggere delle serie TNH sono ideali per il loro utilizzo con i robot collaborativi e le attrezzature di manipolazione. La flangia di montaggio delle mani di presa è conforme con le dimensioni di connessione come da ISO 9409-1-50-4-M6. Con i 12 alberi con ventose a soffietto si possono prelevare, trasportare e riposizionare pezzi fino a 1 kg, in modo sicuro.
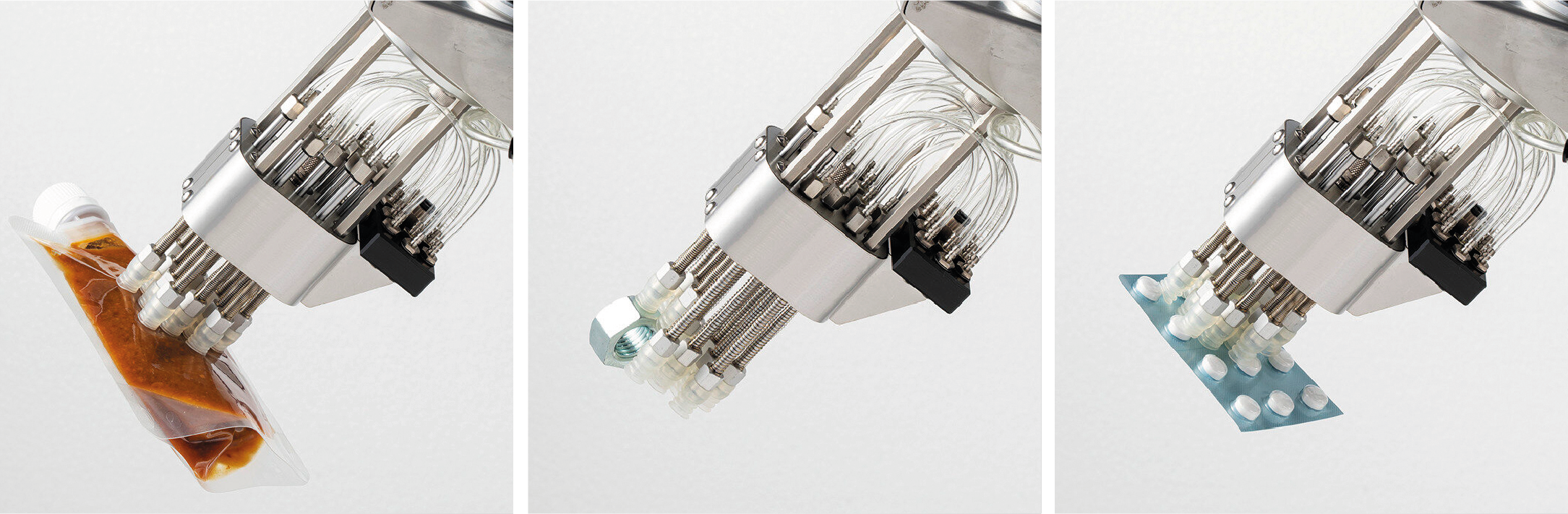
Immagine 2 Esempi di applicazione della mano di presa
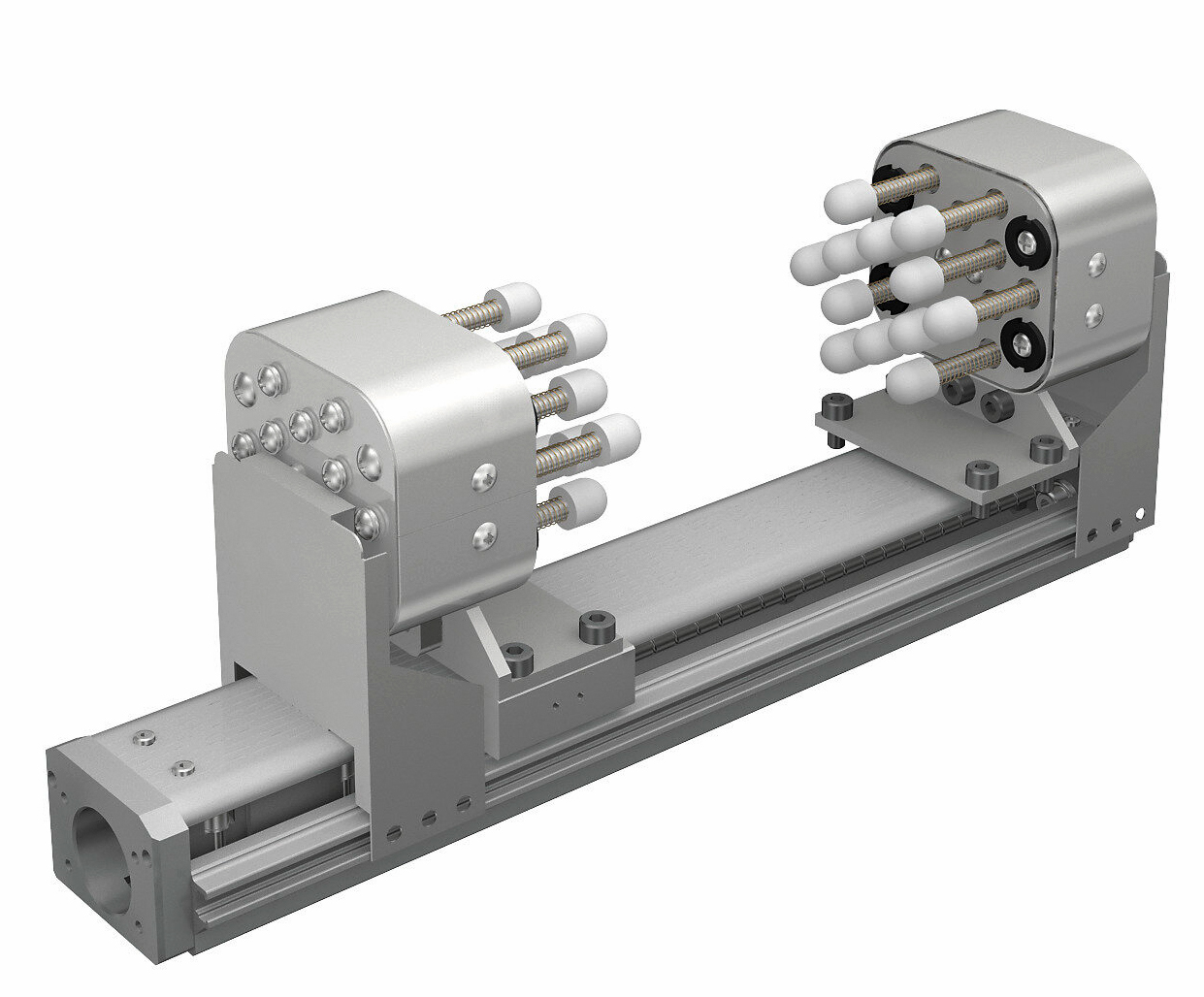
Immagine 3 Unità adattava con mano di presa in disposizione accoppiata
L’unità di presa adattiva dispone di un meccanismo compatto e leggero che si adatta in maniera flessibile al pezzo da lavorare. La gomma in silicone dei terminali degli alberi e la corsa di 20 mm di ogni albero consente una presa sicura e precisa dei pezzi da lavorare che pesano fino a 1 kg. Il rilascio degli alberi viene effettuato meccanicamente.
L’attuatore con vite sinistra/destra (es. il KR-RL di THK) può essere una buona combinazione con il TNH per realizzare “una disposizione accoppiata”.
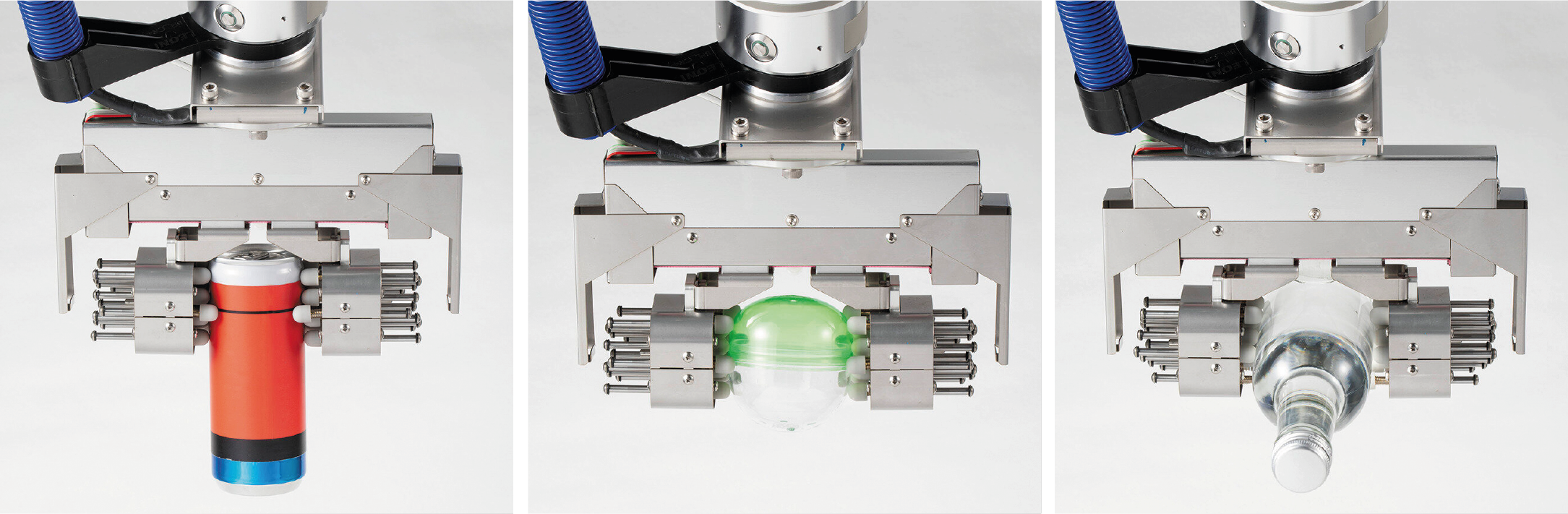
Immagine 4 Esempi di applicazione per l’unità di presa adattiva (in combinazione accoppiata
Video di applicazione per Robot Hand/Griefer
https://www.youtube.com/watch?v=GPdWacUYwXM